Les moteurs électriques sont les machines électriques les plus répandues au monde. Aucune entreprise industrielle, aucun processus technologique ne peut s'en passer. Rotation des ventilateurs, des pompes, mouvement des bandes transporteuses, mouvement des grues - il s'agit d'une liste incomplète, mais déjà importante, de tâches résolues à l'aide de moteurs.
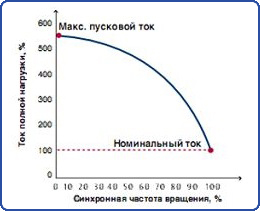
Il existe cependant une nuance dans le fonctionnement de tous les moteurs électriques sans exception : au moment du démarrage, ils consomment brièvement un courant important, appelé courant de démarrage.
Lorsqu'une tension est appliquée à l'enroulement du stator, la vitesse de rotation du rotor est nulle. Le rotor doit être déplacé et tourné à la vitesse nominale. Cela nécessite beaucoup plus d’énergie que ce qui est nécessaire pour le mode de fonctionnement nominal.
 En charge, les courants d’appel sont plus élevés qu’au ralenti. La résistance mécanique à la rotation du mécanisme entraîné par le moteur s'ajoute au poids du rotor. En pratique, ils tentent de minimiser l’influence de ce facteur. Par exemple, pour les ventilateurs puissants, les registres des conduits d'air se ferment automatiquement au moment du démarrage.
En charge, les courants d’appel sont plus élevés qu’au ralenti. La résistance mécanique à la rotation du mécanisme entraîné par le moteur s'ajoute au poids du rotor. En pratique, ils tentent de minimiser l’influence de ce facteur. Par exemple, pour les ventilateurs puissants, les registres des conduits d'air se ferment automatiquement au moment du démarrage.
Au moment où le courant de démarrage provient du réseau, une puissance importante est consommée pour amener le moteur électrique à son mode de fonctionnement nominal. Plus le moteur électrique est puissant, plus il a besoin de puissance pour accélérer. Tous les réseaux électriques ne tolèrent pas ce régime sans conséquences.
La surcharge des lignes d'alimentation entraîne inévitablement une diminution de la tension du réseau. Cela rend non seulement le démarrage des moteurs électriques encore plus difficile, mais affecte également les autres consommateurs.
Et les moteurs électriques eux-mêmes subissent des charges mécaniques et électriques accrues lors des processus de démarrage. Les mécaniques sont associées à une augmentation du couple sur l'arbre. Les électriques, associés à une augmentation à court terme du courant, affectent l'isolation des enroulements du stator et du rotor, des connexions de contact et de l'équipement de démarrage.
Méthodes pour réduire les courants d'appel
Les moteurs électriques de faible puissance dotés de ballasts bon marché démarrent assez bien sans aucun moyen. Réduire leurs courants de démarrage ou modifier la vitesse de rotation n’est pas économiquement réalisable.
Mais, lorsque l'influence sur le mode de fonctionnement du réseau lors du processus de démarrage est importante, les courants d'appel doivent être réduits. Ceci est réalisé grâce à :
- application de moteurs électriques à rotor bobiné ;
- utiliser un circuit pour commuter les enroulements de l'étoile au triangle ;
- utilisation de démarreurs progressifs ;
- utilisation de convertisseurs de fréquence.
Une ou plusieurs de ces méthodes conviennent à chaque mécanisme.
Moteurs électriques à rotor bobiné
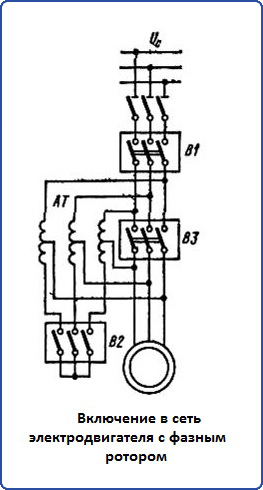 L'utilisation de moteurs électriques asynchrones à rotor bobiné dans des zones de travail aux conditions de travail difficiles est la forme la plus ancienne de réduction des courants de démarrage. Sans eux, le fonctionnement des grues électrifiées, des excavatrices, ainsi que des concasseurs, cribles et broyeurs, qui démarrent rarement lorsqu'il n'y a pas de produit dans le mécanisme entraîné, est impossible.
L'utilisation de moteurs électriques asynchrones à rotor bobiné dans des zones de travail aux conditions de travail difficiles est la forme la plus ancienne de réduction des courants de démarrage. Sans eux, le fonctionnement des grues électrifiées, des excavatrices, ainsi que des concasseurs, cribles et broyeurs, qui démarrent rarement lorsqu'il n'y a pas de produit dans le mécanisme entraîné, est impossible.
La réduction du courant de démarrage est obtenue en supprimant progressivement les résistances du circuit du rotor. Initialement, au moment où la tension est appliquée, la résistance maximale possible est connectée au rotor. Au fur et à mesure que le relais temporisé accélère, ils activent l'un après l'autre des contacteurs qui contournent les sections résistives individuelles. En fin d'accélération, la résistance supplémentaire reliée au circuit rotorique est nulle.
Les moteurs de grue ne disposent pas de commutation automatique d'étage avec résistances. Cela se produit à la volonté du grutier qui déplace les leviers de commande.
Commutation du schéma de connexion de l'enroulement du stator
 Dans le brno (bloc de distribution de démarrage des enroulements) de tout moteur électrique triphasé, il y a 6 bornes des enroulements de toutes les phases. Ainsi, ils peuvent être connectés soit en étoile, soit en triangle.
Dans le brno (bloc de distribution de démarrage des enroulements) de tout moteur électrique triphasé, il y a 6 bornes des enroulements de toutes les phases. Ainsi, ils peuvent être connectés soit en étoile, soit en triangle.
De ce fait, une certaine polyvalence dans l'utilisation de moteurs électriques asynchrones est obtenue. Le circuit de connexion en étoile est conçu pour un niveau de tension plus élevé (par exemple, 660 V) et le circuit de connexion en triangle pour un niveau de tension inférieur (dans cet exemple, 380 V).
Mais à une tension d'alimentation nominale correspondant à un circuit triangle, vous pouvez utiliser un circuit en étoile pour pré-accélérer le moteur électrique. Dans ce cas, le bobinage fonctionne à une tension d'alimentation réduite (380 V au lieu de 660) et le courant d'appel est réduit.
Pour contrôler le processus de commutation, vous aurez besoin d'un câble supplémentaire dans le moteur électrique, car les 6 bornes d'enroulement sont utilisées. Des démarreurs et relais temporisés supplémentaires sont installés pour contrôler leur fonctionnement.
Convertisseurs de fréquence
Les deux premières méthodes ne peuvent pas être appliquées partout. Mais les suivants, devenus disponibles relativement récemment, permettent de démarrer en douceur n'importe quel moteur électrique asynchrone.
Un convertisseur de fréquence est un dispositif semi-conducteur complexe qui combine l'électronique de puissance et des éléments de la technologie des microprocesseurs. La partie puissance redresse et lisse la tension du secteur, la transformant en tension constante. La partie sortie de cette tension forme une tension sinusoïdale avec une fréquence variable de zéro à la valeur nominale - 50 Hz.
De ce fait, des économies d'énergie sont réalisées : les unités entraînées en rotation ne fonctionnent pas avec une productivité excessive, étant dans un mode strictement requis. De plus, le processus technologique a la possibilité d’être affiné.

Mais c'est important dans le spectre du problème considéré : les convertisseurs de fréquence permettent un démarrage en douceur du moteur électrique, sans à-coups ni à-coups. Il n'y a aucun courant de démarrage.
Démarreurs progressifs
Un démarreur progressif pour moteur électrique est le même convertisseur de fréquence, mais avec des fonctionnalités limitées. Il ne fonctionne que lorsque le moteur électrique accélère, modifiant progressivement sa vitesse de rotation de la valeur minimale spécifiée à la valeur nominale.
Pour éviter un fonctionnement inutile de l'appareil une fois l'accélération du moteur électrique terminée, un contacteur de dérivation est installé à proximité. Il connecte le moteur électrique directement au réseau une fois le démarrage terminé.
Lors de la mise à niveau d’équipement, il s’agit de la méthode la plus simple. Il est souvent possible de le mettre en œuvre de vos propres mains, sans l'intervention de spécialistes hautement spécialisés. L'appareil est installé à la place du démarreur magnétique qui contrôle le démarrage du moteur électrique. Il peut être nécessaire de remplacer le câble par un câble blindé. Ensuite, les paramètres du moteur électrique sont entrés dans la mémoire de l'appareil et celui-ci est prêt à fonctionner.
Mais tout le monde ne peut pas gérer seul des convertisseurs de fréquence à part entière. Par conséquent, leur utilisation en exemplaires uniques n’a généralement aucun sens. L'installation de convertisseurs de fréquence n'est justifiée que lors d'une modernisation générale de l'équipement électrique de l'entreprise.
Alexandre Sitnikov (région de Kirov)
Le circuit évoqué dans l'article permet un démarrage et un freinage sans choc du moteur électrique, augmentant ainsi la durée de vie de l'équipement et réduisant la charge sur le réseau électrique. est obtenu en régulant la tension sur les enroulements du moteur avec des thyristors de puissance.
Les dispositifs de démarrage progressif (SFD) sont largement utilisés dans divers entraînements électriques. Le schéma fonctionnel du démarreur progressif développé est illustré à la figure 1 et le schéma de fonctionnement du démarreur progressif est illustré à la figure 2. La base du démarreur progressif est constituée de trois paires de thyristors dos à dos VS1 - VS6, connectés à la pause de chaque phase. Le démarrage en douceur est effectué grâce à un démarrage progressif
augmenter la tension secteur appliquée aux enroulements du moteur d'une certaine valeur initiale Un à la valeur nominale Unom. Ceci est obtenu en augmentant progressivement l'angle de conduction des thyristors VS1 - VS6 de la valeur minimale au maximum pendant le temps Tstart, appelé temps de démarrage.
Généralement, la valeur de Unat est comprise entre 30 et 60 % de Unom, de sorte que le couple de démarrage du moteur électrique est nettement inférieur à celui si le moteur électrique est connecté à la pleine tension du secteur. Dans ce cas, les courroies d'entraînement sont tendues progressivement et les pignons de la boîte de vitesses s'engagent en douceur. Cela a un effet bénéfique sur la réduction des charges dynamiques de l'entraînement électrique et, par conséquent, contribue à prolonger la durée de vie des mécanismes et à augmenter l'intervalle entre les réparations.
L'utilisation d'un démarreur progressif permet également de réduire la charge sur le réseau électrique, puisque dans ce cas le courant de démarrage du moteur électrique est de 2 à 4 fois le courant nominal du moteur, et non de 5 à 7 valeurs, comme avec le direct départ. Ceci est important lors de l'alimentation d'installations électriques à partir de sources d'énergie de puissance limitée, par exemple les groupes électrogènes diesel, les alimentations sans coupure et les sous-stations de transformation de faible puissance.

(surtout en milieu rural). Une fois le démarrage terminé, les thyristors sont contournés par un bypass (contacteur de bypass) K, grâce auquel pendant le temps Trab les thyristors ne dissipent pas de puissance, ce qui signifie que de l'énergie est économisée.
Lorsque le moteur freine, les processus se déroulent dans l'ordre inverse : après la coupure du contacteur K, l'angle de conduction des thyristors est maximum, la tension sur les enroulements du moteur est égale à la tension du secteur moins la chute de tension aux bornes des thyristors . Ensuite, l'angle de conduction des thyristors pendant le temps Ttorm diminue jusqu'à la valeur minimale, qui correspond à la tension de coupure Uots, après quoi l'angle de conduction des thyristors devient nul et aucune tension n'est appliquée aux enroulements. La figure 3 montre les diagrammes de courant d'une des phases du moteur avec une augmentation progressive de l'angle de conduction des thyristors.

La figure 4 montre des fragments du schéma électrique du démarreur progressif. Le schéma complet est disponible sur le site du magazine. Pour son fonctionnement, tension des trois phases A, B, Avec un réseau standard de 380 V avec une fréquence de 50 Hz. Les bobinages du moteur électrique peuvent être reliés soit par une étoile, soit par un triangle.
Comme thyristors de puissance VS1 - VS6, des appareils économiques de type 40TPS12 en boîtier TO-247 avec courant continu Ipr = 35 A sont utilisés. Le courant admissible à travers la phase est Iadd = 2Ipr = 70 A. Nous supposerons que le courant de démarrage maximum est 4Ir, ce qui signifie que Inom< Iдоп/4 = 17,5 А. Просматривая стандартный ряд мощностей электродвигателей, находим, что к УПП допустимо подключать двигатель мощностью 7,5 кВт с номинальным током фазы Iн= 15 А. В случае, если пусковой ток превысит Iдоп (по причине подключения двигателя большей мощности или слишком малого времени пуска), процесс пуска будет остановлен, поскольку сработает автоматический выключатель QF1 со специально подобранной характеристикой.
Les chaînes RC d'amortissement R48, C20, C21, R50, C22, C23, R52, C24, C25 sont connectées en parallèle aux thyristors, empêchant ainsi les fausses activations des thyristors, ainsi que les varistances R49, R51 et R53, absorbant les impulsions de surtension sur 700 V. Les relais de dérivation K1, K2, K3 de type TR91-12VDC-SC-C avec un courant nominal de 40 A shuntent les thyristors de puissance une fois le démarrage terminé.
Le système de contrôle est alimenté par une alimentation de transformateur alimentée par la tension phase-phase du drone. L'alimentation comprend des transformateurs abaisseurs TV1, TV2, un pont de diodes VD1, une résistance de limitation de courant R1, des condensateurs de lissage C1, C3, C5, des condensateurs de suppression de bruit C2, C4, C6 et des stabilisateurs linéaires DA1 et DA2, fournissant des tensions de 12 et 5 V, respectivement.
Le système de contrôle est construit à l'aide d'un microcontrôleur DD1 de type PIC16F873. Le microcontrôleur émet des impulsions de commande pour les thyristors VS1 - VS6 en « allumant » les optosimistors ORT5-ORT10 (MOC3052). Pour limiter le courant dans les circuits de commande des thyristors VS1 - VS6, des résistances R36 - R47 sont utilisées. Des impulsions de commande sont appliquées simultanément à deux thyristors avec un retard par rapport au début de l'alternance de tension composée. Les circuits de synchronisation avec tension secteur sont constitués de trois unités identiques, constituées de résistances de charge R13, R14, R18, R19, R23, R24, de diodes VD3 - VD8, de transistors VT1 - VT3, de condensateurs de stockage C17 - C19 et d'optocoupleurs OPT2 - OPT4. A partir de la sortie 4 des optocoupleurs OPT2, OPT3, OPT4, des impulsions d'une durée d'environ 100 µs sont reçues aux entrées du microcontrôleur RC2, RC1, RC0, correspondant au début de l'alternance négative des tensions de phase Uab, Ubc, Uca.
Les schémas de fonctionnement de l'unité de synchronisation sont présentés à la figure 5. Si nous prenons le graphique du haut comme tension secteur Uav, alors le graphique du milieu correspondra à la tension sur le condensateur C17 et le graphique du bas correspondra au courant traversant le photodiode de l'optocoupleur ORT2. Le microcontrôleur enregistre les impulsions d'horloge arrivant à ses entrées, détermine la présence, l'ordre d'alternance, l'absence de « collage » des phases, et calcule également le temps de retard des impulsions de commande des thyristors. Les entrées des circuits de synchronisation sont protégées des surtensions par des varistances R17, R22 et R27.
À l'aide des potentiomètres R2, R3, R4, les paramètres correspondant au schéma de fonctionnement du démarreur progressif illustré à la figure 2 sont définis ; en conséquence, R2 - Tstart, R3 - Tbrake, R4 - Unstart Uots. Les tensions de consigne des moteurs R2, R3, R4 sont fournies aux entrées RA2, RA1, RA0 du microcircuit DD1 et converties à l'aide d'un CAN. Les temps de démarrage et de freinage sont réglables de 3 à 15 s, et la tension initiale est réglable de zéro à une tension correspondant à l'angle de conduction du thyristor de 60 degrés électriques. Les condensateurs C8 à C10 suppriment le bruit.
Équipe « START » est appliqué en fermant les contacts 1 et 2 du connecteur XS2, tandis qu'un journal apparaît à la sortie 4 de l'optocoupleur OPT1. 1; les condensateurs C14 et C15 suppriment les oscillations dues au «rebond» des contacts. La position ouverte des contacts 1 et 2 du connecteur XS2 correspond à la commande « STOP ». La commutation du circuit de commande de lancement peut être réalisée avec un bouton de verrouillage, un interrupteur à bascule ou des contacts de relais.
Les thyristors de puissance sont protégés de la surchauffe par un thermostat B1009N à contacts normalement fermés situé sur le dissipateur thermique. Lorsque la température atteint 80°C, les contacts du thermostat s'ouvrent et un niveau de journalisation est envoyé à l'entrée RC3 du microcontrôleur. 1, indiquant une surchauffe.
Les LED HL1, HL2, HL3 servent d'indicateurs des états suivants :
- HL1 (vert) « Prêt » - aucune condition d'urgence, prêt à lancer ;
- HL2 (vert) « Fonctionnement » - une LED clignotante signifie que le démarreur progressif démarre ou freine le moteur, une lumière constante signifie qu'il fonctionne en dérivation ;
- HL3 (rouge) « Alarme » - indique une surchauffe du dissipateur thermique, l'absence ou le « collage » des tensions de phase.
Les relais de contournement K1, K2, K3 sont activés en fournissant un journal au microcontrôleur. 1 à la base du transistor VT4.
La programmation du microcontrôleur s'effectue en circuit, pour lequel le connecteur XS3, la diode VD2 et le microswitch J1 sont utilisés. Les éléments ZQ1, C11, C12 forment le circuit de démarrage du générateur d'horloge, R5 et C7 sont le circuit de réinitialisation de l'alimentation, C13 filtre le bruit le long des bus d'alimentation du microcontrôleur.
La figure 6 montre un algorithme simplifié pour le fonctionnement du démarreur progressif. Après avoir initialisé le microcontrôleur, le sous-programme Error_Test est appelé, qui détermine la présence de situations d'urgence : surchauffe du dissipateur thermique, impossibilité de se synchroniser avec la tension secteur en raison d'une perte de phase, d'une connexion incorrecte au réseau ou de fortes interférences. Si la situation d'urgence n'est pas enregistrée, alors la variable Erreur reçoit la valeur « 0 », après le retour du sous-programme, la LED « Prêt » s'allume et le circuit passe en mode veille pour la commande « START ». Après avoir enregistré la commande « START », le microcontrôleur effectue une conversion analogique-numérique des tensions de consigne.
sur les potentiomètres et le calcul des paramètres Tstart et Ustart, après quoi il émet des impulsions de commande pour les thyristors de puissance. A la fin du démarrage, le bypass est activé. Lorsque le moteur freine, les processus de contrôle sont effectués en sens inverse
d'accord.
Qui veut se fatiguer, dépenser son argent et son temps pour rééquiper des appareils et des mécanismes qui fonctionnent déjà parfaitement ? Comme le montre la pratique, beaucoup le font. Bien que tout le monde ne rencontre pas dans la vie des équipements industriels équipés de moteurs électriques puissants, ils rencontrent constamment, bien que moins voraces et puissants, des moteurs électriques dans la vie de tous les jours. Eh bien, tout le monde a probablement utilisé l'ascenseur.
Moteurs et charges électriques - un problème ?
Le fait est que pratiquement n'importe quel moteur électrique, au moment du démarrage ou de l'arrêt du rotor, subit d'énormes charges. Plus le moteur et l’équipement qu’il entraîne sont puissants, plus les coûts de démarrage sont élevés.
La charge la plus importante imposée au moteur au moment du démarrage est probablement un excès multiple, quoique à court terme, du courant de fonctionnement nominal de l'unité. Après seulement quelques secondes de fonctionnement, lorsque le moteur électrique atteint sa vitesse normale, le courant consommé par celui-ci reviendra également à des niveaux normaux. Pour assurer l’alimentation électrique nécessaire, il est nécessaire d’augmenter la capacité des équipements électriques et des lignes conductrices, ce qui entraîne une hausse de leur prix.
Lors du démarrage d'un moteur électrique puissant, en raison de sa consommation élevée, la tension d'alimentation « chute », ce qui peut entraîner des pannes ou des pannes d'équipements alimentés par la même ligne. De plus, la durée de vie des équipements d'alimentation électrique est réduite.
Si des situations d'urgence surviennent entraînant un grillage du moteur ou une surchauffe grave, les propriétés de l'acier du transformateur peuvent tellement changer qu'après réparation, le moteur perdra jusqu'à trente pour cent de sa puissance. Dans de telles circonstances, il n’est plus adapté à une utilisation ultérieure et doit être remplacé, ce qui n’est pas non plus bon marché.
Pourquoi avez-vous besoin d’un démarrage en douceur ?
Il semblerait que tout soit correct et que l'équipement soit conçu pour cela. Mais il y a toujours un « mais ». Dans notre cas il y en a plusieurs :
- au moment du démarrage du moteur électrique, le courant d'alimentation peut dépasser le courant nominal de quatre fois et demie à cinq fois, ce qui entraîne un échauffement important des enroulements, et ce n'est pas très bon ;
- le démarrage du moteur par commutation directe entraîne des à-coups, qui affectent principalement la densité des mêmes enroulements, augmentant le frottement des conducteurs pendant le fonctionnement, accélère la destruction de leur isolation et, avec le temps, peut conduire à un court-circuit entre spires ;
- les à-coups et vibrations mentionnés ci-dessus sont transmis à l'ensemble de l'unité entraînée. Ce n'est pas du tout sain car cela peut endommager ses pièces mobiles : systèmes d'engrenages, courroies d'entraînement, tapis roulants, ou imaginez-vous simplement rouler dans un ascenseur saccadé. Dans le cas des pompes et des ventilateurs, il s'agit du risque de déformation et de destruction des turbines et des aubes ;
- Il ne faut pas non plus oublier les produits qui peuvent se trouver sur la chaîne de production. Ils peuvent tomber, s'effondrer ou se casser à cause d'une telle secousse ;
- Eh bien, et probablement le dernier point qui mérite notre attention est le coût de fonctionnement d’un tel équipement. Nous parlons non seulement de réparations coûteuses associées à des charges critiques fréquentes, mais également d'une quantité importante d'électricité dépensée de manière inefficace.
Il semblerait que toutes les difficultés de fonctionnement ci-dessus ne soient inhérentes qu'aux équipements industriels puissants et encombrants, mais ce n'est pas le cas. Tout cela peut devenir un casse-tête pour toute personne moyenne. Cela s'applique principalement aux outils électriques.
L'utilisation spécifique d'unités telles que des scies sauteuses, des perceuses, des meuleuses et analogues nécessite de multiples cycles de démarrage et d'arrêt sur une période de temps relativement courte. Ce mode de fonctionnement affecte leur durabilité et leur consommation d'énergie au même titre que leurs homologues industriels. Avec tout cela, il ne faut pas oublier que les systèmes de démarrage progressif ne peuvent pas réguler la vitesse de fonctionnement du moteur ni inverser sa direction. Il est également impossible d'augmenter le couple de démarrage ou de réduire le courant en dessous de celui nécessaire pour démarrer la rotation du rotor du moteur.
Options pour systèmes de démarrage progressif pour moteurs électriques
Système étoile-triangle
L'un des systèmes de démarrage les plus utilisés pour les moteurs asynchrones industriels. Son principal avantage est la simplicité. Le moteur démarre lorsque les enroulements du système en étoile sont commutés, après quoi, lorsque la vitesse normale est atteinte, il passe automatiquement en commutation triangle. Cette option de démarrage permet d'obtenir un courant presque un tiers inférieur à celui du démarrage direct du moteur électrique.
Cependant, cette méthode n’est pas adaptée aux mécanismes à faible inertie en rotation. Il s'agit par exemple de ventilateurs et de petites pompes, en raison de la petite taille et du poids de leurs turbines. Au moment du passage de la configuration « étoile » à la configuration « triangle », ils réduiront fortement la vitesse ou s'arrêteront complètement. En conséquence, après la commutation, le moteur électrique redémarre essentiellement. Autrement dit, en fin de compte, non seulement vous ne réaliserez pas d'économies sur la durée de vie du moteur, mais vous vous retrouverez également très probablement avec une consommation d'énergie excessive.
Système de démarrage progressif du moteur électronique
Un démarrage en douceur du moteur peut être effectué à l'aide de triacs connectés au circuit de commande. Il existe trois schémas pour une telle connexion : monophasé, biphasé et triphasé. Chacun d’eux diffère respectivement par sa fonctionnalité et son coût final.
En utilisant de tels circuits, il est généralement possible de réduire le courant de démarrage à deux ou trois courants nominaux. De plus, il est possible de réduire l'échauffement important inhérent au système étoile-triangle susmentionné, ce qui contribue à augmenter la durée de vie des moteurs électriques. Du fait que le démarrage du moteur est contrôlé en réduisant la tension, le rotor accélère en douceur et non brusquement, comme dans les autres circuits.
En général, les systèmes de démarrage progressif des moteurs se voient confier plusieurs tâches clés :
- le principal est de réduire le courant de démarrage à trois ou quatre courants nominaux ;
- réduire la tension d'alimentation du moteur, si l'alimentation et le câblage appropriés sont disponibles ;
- amélioration des paramètres de démarrage et de freinage ;
- protection du réseau de secours contre les surcharges de courant.
Circuit de démarrage monophasé
Ce circuit est conçu pour démarrer des moteurs électriques d'une puissance ne dépassant pas onze kilowatts. Cette option est utilisée s'il est nécessaire d'adoucir le choc au démarrage, mais le freinage, le démarrage progressif et la réduction du courant de démarrage n'ont pas d'importance. Principalement en raison de l’impossibilité d’organiser ces dernières selon un tel schéma. Mais en raison de la production moins coûteuse de semi-conducteurs, y compris de triacs, ils ont été abandonnés et sont rarement vus ;
Circuit de démarrage biphasé
Ce circuit est conçu pour réguler et démarrer des moteurs d'une puissance allant jusqu'à deux cent cinquante watts. De tels systèmes de démarrage progressif sont parfois équipés d'un contacteur de dérivation pour réduire le coût de l'appareil, cependant, cela ne résout pas le problème de l'asymétrie d'alimentation des phases, qui peut conduire à une surchauffe ;
Circuit de démarrage triphasé
Ce circuit est le système de démarrage progressif le plus fiable et le plus universel pour les moteurs électriques. La puissance maximale des moteurs pilotés par un tel dispositif est limitée uniquement par la température maximale et l'endurance électrique des triacs utilisés. Sa polyvalence permet de mettre en œuvre de nombreuses fonctions, telles que : freinage dynamique, reprise inverse ou équilibrage du champ magnétique et limitation de courant.
Un élément important du dernier des circuits mentionnés est le contacteur de dérivation, mentionné précédemment. Il permet de garantir les bonnes conditions thermiques du système de démarrage progressif du moteur électrique, une fois que le moteur a atteint son régime de fonctionnement normal, en évitant toute surchauffe.
Les dispositifs de démarrage progressif pour moteurs électriques qui existent aujourd'hui, en plus des propriétés ci-dessus, sont conçus pour fonctionner avec divers contrôleurs et systèmes d'automatisation. Ils ont la capacité d'être activés par commande de l'opérateur ou du système de contrôle global. Dans de telles circonstances, lors de la mise sous tension des charges, des interférences peuvent apparaître, pouvant entraîner des dysfonctionnements de l'automatisation. Il convient donc de prêter attention aux systèmes de protection. L'utilisation de circuits de démarrage progressif peut réduire considérablement leur influence.
Démarrage progressif à faire soi-même
La plupart des systèmes énumérés ci-dessus ne sont en réalité pas applicables dans des conditions domestiques. Principalement parce que chez nous, nous utilisons extrêmement rarement des moteurs asynchrones triphasés. Mais il existe largement assez de moteurs monophasés à collecteur.
Il existe de nombreux schémas pour un démarrage en douceur des moteurs. Le choix d'un modèle spécifique dépend entièrement de vous, mais en principe, ayant une certaine connaissance de l'ingénierie radio, des mains habiles et du désir, il est tout à fait possible d'assembler un démarreur maison décent qui prolongera la durée de vie de vos outils électriques et électroménagers. pendant de nombreuses années.
elektro.guru
Démarrer un moteur à induction en douceur est toujours une tâche difficile car le démarrage d'un moteur à induction nécessite beaucoup de courant et de couple, ce qui peut griller l'enroulement du moteur. Les ingénieurs proposent et mettent en œuvre en permanence des solutions techniques intéressantes pour pallier ce problème, par exemple en utilisant un circuit de connexion étoile-triangle, un autotransformateur, etc.
Actuellement, des méthodes similaires sont utilisées dans diverses installations industrielles pour le fonctionnement ininterrompu des moteurs électriques.
Pourquoi avons-nous besoin d’UPP ?
Le principe de fonctionnement d'un moteur électrique à induction est connu de la physique, dont l'essence est d'utiliser la différence entre les fréquences de rotation des champs magnétiques du stator et du rotor. Le champ magnétique du rotor, essayant de rattraper le champ magnétique du stator, contribue à l'excitation d'un courant de démarrage important. Le moteur tourne à pleine vitesse et la valeur du couple augmente également avec le courant. En conséquence, le bobinage de l'appareil peut être endommagé en raison d'une surchauffe.
Ainsi, il devient nécessaire d'installer un démarreur progressif. Les démarreurs progressifs pour moteurs asynchrones triphasés vous permettent de protéger les unités du courant et du couple initiaux élevés qui surviennent en raison de l'effet de glissement lors du fonctionnement d'un moteur à induction.
Avantages de l'utilisation d'un circuit avec démarreur progressif (SPD) :
- réduction du courant de démarrage ;
- réduction des coûts énergétiques;
- accroître l'efficacité;
- coût relativement faible;
- atteindre une vitesse maximale sans endommager l'appareil.
Comment démarrer le moteur en douceur ?
Il existe cinq principales méthodes de démarrage progressif.
- Un couple élevé peut être créé en ajoutant une résistance externe au circuit du rotor, comme indiqué sur la figure.

- En incluant un transformateur automatique dans le circuit, le courant de démarrage et le couple peuvent être maintenus en réduisant la tension initiale. Voir l'image ci-dessous.

- Le démarrage direct est la méthode la plus simple et la moins chère car le moteur à induction est connecté directement à la source d'alimentation.
- Connexions utilisant une configuration d'enroulement spéciale - la méthode est applicable aux moteurs destinés à fonctionner dans des conditions normales.

- L'utilisation de SCP est la méthode la plus avancée de toutes les méthodes répertoriées. Ici, les dispositifs semi-conducteurs tels que les thyristors ou les SCR, qui contrôlent la vitesse d'un moteur à induction, remplacent avec succès les composants mécaniques.

Contrôleur de vitesse du moteur à collecteur
La plupart des circuits pour appareils électroménagers et outils électriques sont basés sur un moteur à collecteur de 220 V. Cette demande s'explique par sa polyvalence. Les unités peuvent être alimentées en tension continue ou alternative. L'avantage du circuit réside dans la fourniture d'un couple de démarrage efficace.
Pour obtenir un démarrage plus fluide et pouvoir ajuster la vitesse de rotation, des contrôleurs de vitesse sont utilisés.
Vous pouvez par exemple démarrer un moteur électrique de vos propres mains de cette manière.

Conclusion
Les démarreurs progressifs sont conçus et réalisés pour limiter l'augmentation des paramètres techniques de démarrage du moteur. Dans le cas contraire, des phénomènes indésirables pourraient entraîner des dommages à l'unité, une brûlure des enroulements ou une surchauffe des circuits de fonctionnement. Pour un service à long terme, il est important que le moteur triphasé fonctionne sans surtensions, en mode démarrage progressif.
Dès que le moteur à induction atteint la vitesse requise, un signal est envoyé pour ouvrir le circuit relais. L'unité est prête à fonctionner à pleine vitesse sans surchauffe ni panne du système. Les méthodes présentées peuvent être utiles pour résoudre des problèmes industriels et domestiques.
electricdoma.ru
Démarrage en douceur d'un moteur électrique asynchrone. Conception et principe de fonctionnement
 Les moteurs électriques asynchrones, en plus des avantages évidents, présentent deux inconvénients importants : un courant de démarrage important (jusqu'à sept fois supérieur au courant nominal) et une à-coup au démarrage. Ces défauts affectent négativement l'état des réseaux électriques, nécessitent l'utilisation de disjoncteurs avec une caractéristique temps-courant appropriée et créent des charges dynamiques critiques sur les équipements.
Les moteurs électriques asynchrones, en plus des avantages évidents, présentent deux inconvénients importants : un courant de démarrage important (jusqu'à sept fois supérieur au courant nominal) et une à-coup au démarrage. Ces défauts affectent négativement l'état des réseaux électriques, nécessitent l'utilisation de disjoncteurs avec une caractéristique temps-courant appropriée et créent des charges dynamiques critiques sur les équipements.
Tout le monde connaît l'effet du démarrage d'un moteur asynchrone puissant : « la tension chute et tout autour du moteur électrique tremble. Par conséquent, pour réduire les impacts négatifs, des méthodes et des schémas ont été développés pour atténuer les à-coups et rendre le démarrage d'un moteur asynchrone avec un rotor à cage d'écureuil plus fluide.
Méthodes pour un démarrage en douceur des moteurs asynchrones
En plus de l'impact négatif sur le circuit électrique et sur l'environnement, l'impulsion de démarrage d'un moteur électrique est également nocive pour ses enroulements de stator, car le moment de force accrue lors du démarrage est appliqué aux enroulements. C'est-à-dire que la force de secousse du rotor exerce une pression intense sur les fils de bobinage, accélérant ainsi l'usure de leur isolation, dont la panne est appelée court-circuit entre spires.

Illustration du principe de fonctionnement d'un moteur électrique asynchrone
Puisqu'il est structurellement impossible de réduire le courant de démarrage, des méthodes, circuits et dispositifs ont été inventés pour assurer un démarrage en douceur d'un moteur asynchrone. Dans la plupart des cas, dans les industries dotées de lignes électriques puissantes et dans la vie quotidienne, cette option n'est pas obligatoire, car les fluctuations de tension et les vibrations de démarrage n'ont pas d'impact significatif sur le processus de production.
Graphiques des changements de courant lors du démarrage direct et de l'utilisation de démarreurs progressifs
Mais il existe des technologies qui nécessitent des paramètres stables, ne dépassant pas les paramètres standards, à la fois pour l'alimentation électrique et les charges dynamiques. Par exemple, il pourrait s'agir d'équipements de précision fonctionnant sur le même réseau avec des consommateurs d'électricité sensibles à la tension. Dans ce cas, pour respecter les normes technologiques de démarrage progressif du moteur électrique, différentes méthodes sont utilisées :
- Commutation étoile-triangle ;
- Démarrage à l'aide d'un autotransformateur ;
- dispositifs de démarrage progressif des moteurs asynchrones (USM).
La vidéo ci-dessous répertorie les principaux problèmes qui surviennent lors du démarrage d'un moteur électrique et décrit également les avantages et les inconvénients de divers démarreurs progressifs pour moteurs électriques asynchrones à cage d'écureuil.
D'une autre manière, les UPP sont également appelés démarreurs progressifs, de l'anglais « soft » - soft. Ci-dessous, nous décrirons brièvement les types et les options proposées dans les démarreurs progressifs largement utilisés. Vous pouvez également vous familiariser avec du matériel supplémentaire sur les démarreurs progressifs
Démarreurs progressifs industriels pour moteurs électriques de différentes puissances
Introduction au principe du démarrage progressif
Afin de démarrer en douceur un moteur électrique asynchrone aussi efficacement que possible et à moindre coût en achetant des démarreurs progressifs prêts à l'emploi, vous devez d'abord vous familiariser avec le principe de fonctionnement de ces dispositifs et circuits. Comprendre l'interaction des paramètres physiques vous permettra de faire le choix optimal de démarreur progressif.
À l'aide de démarreurs progressifs, il est possible de réduire le courant de démarrage à une valeur de trois fois la valeur nominale (au lieu d'une surcharge sept fois supérieure)
Pour un démarrage en douceur d'un moteur électrique asynchrone, il est nécessaire de réduire le courant de démarrage, ce qui aura un effet positif à la fois sur la charge du réseau électrique et sur les surcharges dynamiques des enroulements du moteur et des mécanismes d'entraînement. Ils obtiennent une réduction du courant de démarrage en réduisant la tension d'alimentation du moteur électrique. Une tension de démarrage réduite est utilisée dans les trois méthodes proposées ci-dessus. Par exemple, à l'aide d'un autotransformateur, l'utilisateur abaisse indépendamment la tension au démarrage en tournant le curseur.

En abaissant la tension au démarrage, vous pouvez obtenir un démarrage en douceur du moteur électrique
Lors de l'utilisation de la commutation étoile-triangle, la tension de ligne sur les enroulements du moteur change. La commutation s'effectue à l'aide de contacteurs et d'un relais temporisé conçus pour le démarrage du moteur électrique. Une description détaillée du démarrage progressif d'un moteur électrique asynchrone utilisant la commutation étoile-triangle est disponible sur cette ressource au lien spécifié.

Circuit de commutation étoile-triangle utilisant des contacteurs et des relais temporisés
Théorie du démarrage progressif
Pour comprendre le principe d'un démarrage en douceur, il est nécessaire de comprendre la loi de conservation de l'énergie nécessaire pour faire tourner l'arbre du rotor d'un moteur électrique. De manière simplifiée, on peut considérer l'énergie d'accélération comme proportionnelle à la puissance et au temps, E = P*t, où P est la puissance égale au courant multiplié par la tension (P = U*I). En conséquence, E = U*I *t. Car pour réduire le couple de démarrage et réduire la charge sur le réseau il faut réduire le courant de démarrage I, alors tout en maintenant le niveau d'énergie dépensé, il faut augmenter le temps d'accélération.
Augmenter le temps d'accélération en réduisant le courant de démarrage n'est possible qu'avec une faible charge sur l'arbre. C'est le principal inconvénient de tous les UPP
Par conséquent, pour les équipements présentant des conditions de démarrage difficiles (charge importante sur l'arbre lors du démarrage), des moteurs électriques spéciaux à rotor bobiné sont utilisés. Vous pouvez découvrir les propriétés de ces moteurs dans la section correspondante de l'article sur cette ressource en cliquant sur le lien.

Moteur à rotor phasique, nécessaire pour les équipements lourds
Il est également nécessaire de prendre en compte le fait que lors d'un démarrage progressif, un échauffement accru des enroulements et des interrupteurs électroniques de puissance du dispositif de démarrage se produit. Pour refroidir les commutateurs à semi-conducteurs, il est nécessaire d'utiliser des radiateurs massifs, ce qui augmente le coût de l'appareil. Par conséquent, il est approprié d'utiliser un démarreur progressif pour une accélération à court terme du moteur avec un contournement supplémentaire des interrupteurs avec tension secteur continue. Ce mode (commutation de dérivation) rend le dispositif électronique de démarrage progressif pour moteurs asynchrones plus compact et moins cher, mais limite le nombre de démarrages dans un certain intervalle en raison du temps nécessaire au refroidissement des touches.

Schéma fonctionnel des commutateurs à semi-conducteurs de puissance shunt (bypass)
Principaux paramètres et caractéristiques du démarreur progressif
Ci-dessous dans le texte, vous trouverez des schémas de dispositifs de démarrage progressif pour étude et auto-fabrication. Pour ceux qui ne sont pas prêts à démarrer en douceur un moteur électrique asynchrone de leurs propres mains, en s'appuyant sur un produit fini, des informations sur les types de démarreurs progressifs existants seront utiles.

Exemple de démarreur progressif analogique et numérique, en conception modulaire (monté sur rail DIN)
L'un des principaux paramètres lors du choix d'un démarreur progressif est la puissance du moteur électrique à entretenir, exprimée en kilowatts. Le temps d'accélération et la possibilité d'ajuster l'intervalle de démarrage sont tout aussi importants. Tous les démarreurs progressifs existants possèdent ces caractéristiques. Les démarreurs progressifs plus avancés sont universels et vous permettent de configurer les paramètres de démarrage progressif dans une large plage de valeurs relatives aux caractéristiques du moteur et aux exigences du processus.

Un exemple de démarreur progressif universel
Selon le type de démarreur progressif, ils peuvent contenir diverses options qui augmentent les fonctionnalités de l'appareil et permettent de contrôler le fonctionnement du moteur électrique. Par exemple, à l'aide de certains démarreurs progressifs, il est possible non seulement de démarrer en douceur un moteur électrique, mais également de le freiner. Des démarreurs progressifs plus avancés protègent le moteur des surcharges et vous permettent également de réguler le couple du rotor pendant le démarrage, l'arrêt et le fonctionnement.

Un exemple de différences dans les caractéristiques techniques de différents démarreurs progressifs d'un même fabricant
Types de démarreurs progressifs
Selon la méthode de connexion, les démarreurs progressifs sont divisés en trois types :

SCP à faire soi-même
Pour l'autoproduction d'un démarreur progressif, le circuit de démarrage progressif à faire soi-même pour un moteur asynchrone dépendra des capacités et des compétences de l'artisan. L'atténuation indépendante des surcharges de démarrage à l'aide d'un autotransformateur est disponible pour presque tous les utilisateurs sans connaissances particulières, mais cette méthode est peu pratique en raison de la nécessité d'ajuster manuellement le démarrage du moteur électrique. En vente, vous pouvez trouver des dispositifs de démarrage progressif peu coûteux que vous devrez connecter vous-même à l'outil électrique, sans avoir une connaissance approfondie de l'ingénierie radio. Un exemple de travaux avant et après le démarreur progressif, ainsi que son raccordement, est présenté dans la vidéo ci-dessous :
Pour les artisans ayant des connaissances générales en génie électrique et des compétences pratiques en installation électrique, un circuit de commutation étoile-triangle convient pour effectuer un démarrage en douceur de leurs propres mains. Ces systèmes, malgré leur âge avancé, sont très répandus et sont encore utilisés avec succès en raison de leur simplicité et de leur fiabilité. En fonction des qualifications du maître, vous pouvez trouver des diagrammes SCP sur Internet à répéter de vos propres mains.
Un exemple de circuit d'un démarreur progressif biphasé relativement simple
Les démarreurs progressifs modernes contiennent à l'intérieur un remplissage électronique complexe composé de nombreux composants électroniques fonctionnant sous le contrôle d'un microprocesseur. Par conséquent, pour créer de vos propres mains un démarreur progressif similaire à l'aide de schémas de circuits disponibles sur Internet, vous avez besoin non seulement des compétences d'un radioamateur, mais également des compétences de programmation de microcontrôleurs.
infoelecrik.ru
Dispositif de démarrage progressif pour moteurs - Site Web pour la réparation, le raccordement, l'installation d'électriciens de vos propres mains !
 Bonjour mes chers lecteurs. Dans cet article, nous examinerons les options possibles pour un démarrage en douceur du moteur.
Bonjour mes chers lecteurs. Dans cet article, nous examinerons les options possibles pour un démarrage en douceur du moteur.
Ce n'est un secret pour personne depuis longtemps que tous les moteurs électriques au moment du démarrage souffrent d'une maladie désagréable : les courants de démarrage élevés. Il n’existe aucun moyen de traiter ce problème sans « médicaments » spéciaux. En bref, la résistance totale (ou équivalente) d'un inducteur (enroulement du moteur, comme cas particulier) est constituée d'une résistance active (résistance de la bobine au courant continu) et inductive (réactive), qui dépend de la fréquence de la tension alternative. et l'inductance. Vous pouvez en savoir plus sur la résistance dans cet article.
C'est là que réside la cause de la maladie du moteur. Lorsque le moteur atteint le régime nominal, la réactance inductive est très grande et, par conséquent, la somme des résistances active et réactive est également grande, mais lorsque le moteur est arrêté, la réactance inductive est pratiquement nulle, seule la résistance active reste, et c'est petit. Selon la loi d'Ohm, le courant dans un circuit est inversement proportionnel à la résistance, c'est-à-dire plus il est petit, plus le courant est important. Eh bien, là où il y a des courants élevés, ne vous attendez à rien de bon. Un courant important signifie une force importante, et une force importante essaie généralement de tout briser sur son passage. C'est là que les démarreurs progressifs sont utiles.
L'une des options peut être considérée comme l'utilisation de convertisseurs de fréquence. L'avantage de cette méthode de démarrage progressif est la possibilité d'ajuster le régime moteur dans des limites très précises, le réglage flexible de l'heure de démarrage, la possibilité de régler la vitesse et le démarrage à distance, l'utilisation dans des circuits dépendants (lorsque la vitesse des révolutions est contrôlée par un appareil, capteur, etc). Le seul inconvénient de cette méthode est le prix et la complexité de configuration de certains modèles. Eh bien, il arrive très souvent que nous achetions un « jouet » coûteux et que nous utilisions 15 % de ce qu’il peut faire.
Il existe un autre moyen, assez intéressant, mais en même temps peu coûteux, de se lancer en douceur. Mais il y a un petit hic. Le moteur doit être sélectionné de manière à ce que, avec la méthode de connexion « triangle », il soit adapté à notre tension, c'est-à-dire que si nous avons trois phases avec une tension entre elles de 380 volts, alors le moteur doit être de 660/380 volts. Le principe est que lorsqu'il est connecté par une étoile, le moteur tourne plus doucement et, d'ailleurs, ne développe pas sa puissance nominale. Lorsque les enroulements sont connectés en triangle, le moteur délivre la totalité de la puissance déclarée, mais en même temps « se détache ». Ce circuit vous permet de faire tourner le moteur sur une « étoile » à une tension réellement réduite (c'est-à-dire que le moteur dans notre exemple a besoin de 660 volts lorsqu'il est connecté à une étoile, et nous lui en donnons 380), puis nous le commutons sur un triangle, mais il fonctionne déjà à la vitesse nominale ou proche de la vitesse nominale et une forte surtension ne se produira pas.

La simplicité du système présente un certain nombre d'inconvénients. Il est préférable d'utiliser non pas deux machines, mais un interrupteur qui commutera les contacts. Car si vous allumez deux machines à la fois, un court-circuit se produira. Un autre inconvénient est qu'avec un tel schéma, il est assez difficile d'organiser une inversion, uniquement si vous créez une autre unité de contrôle, mais uniquement en sens inverse. Eh bien, l'inconvénient général des moteurs asynchrones triphasés est que lorsqu'ils sont connectés en triangle, la température du moteur est plus élevée et il travaille plus fort que lorsqu'ils sont connectés en étoile, mais cela est compréhensible, car il produit toute la puissance.
Une autre façon consiste à utiliser des rhéostats. La difficulté est qu’ils doivent être puissants, il faut qu’ils soient trois et qu’ils doivent être ajustés en même temps. Nous examinerons le principe de fonctionnement ci-dessous.
Le monde ne reste pas immobile et l’industrie électronique a trouvé une solution à de tels cas. Cette solution est appelée « démarreur progressif ». En gros, il s'agit presque d'un convertisseur de fréquence, mais incroyablement simple. Il n'a pas les mêmes capacités de programmation que l'onduleur. Nous allons maintenant découvrir quelles sont les opportunités qui existent.
Principe de fonctionnement d'un démarreur progressif de moteur
C'est simple. Rappelons la loi d'Ohm : le courant dans un circuit est directement proportionnel à la tension, ce qui signifie que pour réduire le courant, il faut réduire la tension. C'est exactement ce que fait un démarreur progressif. Il s’agit essentiellement d’un remplacement des rhéostats dont nous avons parlé ci-dessus. Le schéma de principe d'un tel appareil pourrait bien ressembler à ceci :

Nous voyons un ensemble de microcircuits qui contrôlent les interrupteurs à thyristors, qui limitent la tension fournie au moteur. Dans ce cas, le schéma est très primitif : l'intervalle de temps est ici fixé de manière rigide et non réglable. Les modèles modernes ont différents réglages.
Le principe de fonctionnement est simple. Le circuit définit une certaine tension initiale (30 à 60 % de la valeur nominale) et définit le temps pendant lequel cette tension initiale atteint la valeur nominale. Ce à quoi vous devez faire attention lors du choix d'un tel appareil. Tout d'abord, bien sûr, la puissance (dans les cas critiques il est logique de prendre une marge d'au moins 30%, cela permet d'espérer que l'appareil fonctionnera plus longtemps), le deuxième paramètre est le temps de redémarrage (cet indicateur indique après quelle période de temps, vous pouvez redémarrer un moteur complètement arrêté). Les paramètres restants seront déterminés uniquement par votre appétit et vos demandes. Et bien, comme d'habitude – un souhait : bonne chance avec vos créations !
jelektro.ru
Schéma d'un dispositif de démarrage progressif à thyristors pour un moteur électrique asynchrone
Alexandre Sitnikov (région de Kirov)
Le circuit évoqué dans l'article permet un démarrage et un freinage sans choc du moteur électrique, augmentant ainsi la durée de vie de l'équipement et réduisant la charge sur le réseau électrique. Un démarrage progressif est obtenu en régulant la tension sur les enroulements du moteur avec des thyristors de puissance.
Les dispositifs de démarrage progressif (SFD) sont largement utilisés dans divers entraînements électriques. Le schéma fonctionnel du démarreur progressif développé est illustré à la figure 1 et le schéma de fonctionnement du démarreur progressif est illustré à la figure 2. La base du démarreur progressif est constituée de trois paires de thyristors dos à dos VS1 - VS6, connectés à la pause de chaque phase. Le démarrage en douceur est effectué grâce à un démarrage progressif

augmenter la tension secteur appliquée aux enroulements du moteur d'une certaine valeur initiale Un à la valeur nominale Unom. Ceci est obtenu en augmentant progressivement l'angle de conduction des thyristors VS1 - VS6 de la valeur minimale au maximum pendant le temps Tstart, appelé temps de démarrage.
Généralement, la valeur de Unat est comprise entre 30 et 60 % de Unom, de sorte que le couple de démarrage du moteur électrique est nettement inférieur à celui si le moteur électrique est connecté à la pleine tension du secteur. Dans ce cas, les courroies d'entraînement sont tendues progressivement et les pignons de la boîte de vitesses s'engagent en douceur. Cela a un effet bénéfique sur la réduction des charges dynamiques de l'entraînement électrique et, par conséquent, contribue à prolonger la durée de vie des mécanismes et à augmenter l'intervalle entre les réparations.
L'utilisation d'un démarreur progressif permet également de réduire la charge sur le réseau électrique, puisque dans ce cas le courant de démarrage du moteur électrique est de 2 à 4 courant nominal du moteur, et non de 5 à 7 courant nominal, comme pour le démarrage direct. . Ceci est important lors de l'alimentation d'installations électriques à partir de sources d'énergie de puissance limitée, par exemple les groupes électrogènes diesel, les alimentations sans coupure et les sous-stations de transformation de faible puissance.

(surtout en milieu rural). Une fois le démarrage terminé, les thyristors sont contournés par un bypass (contacteur de bypass) K, grâce auquel pendant le temps Trab les thyristors ne dissipent pas de puissance, ce qui signifie que de l'énergie est économisée.
Lorsque le moteur freine, les processus se déroulent dans l'ordre inverse : après la coupure du contacteur K, l'angle de conduction des thyristors est maximum, la tension sur les enroulements du moteur est égale à la tension du secteur moins la chute de tension aux bornes des thyristors . Ensuite, l'angle de conduction des thyristors pendant le temps Ttorm diminue jusqu'à la valeur minimale, qui correspond à la tension de coupure Uots, après quoi l'angle de conduction des thyristors devient nul et aucune tension n'est appliquée aux enroulements. La figure 3 montre les diagrammes de courant d'une des phases du moteur avec une augmentation progressive de l'angle de conduction des thyristors.

La figure 4 montre des fragments du schéma électrique du démarreur progressif. Le schéma complet est disponible sur le site du magazine. Pour son fonctionnement, une tension des trois phases A, B, C d'un réseau standard de 380 V avec une fréquence de 50 Hz est nécessaire. Les bobinages du moteur électrique peuvent être reliés soit par une étoile, soit par un triangle.

Comme thyristors de puissance VS1 - VS6, des appareils bon marché de type 40TPS12 en boîtier TO-247 avec courant continu Ipr = 35 A sont utilisés. Le courant admissible à travers la phase est Iadd = 2Ipr = 70 A. Nous supposerons que le courant de démarrage maximum est de 4Ir , ce qui signifie qu'Inom< Iдоп/4 = 17,5 А. Просматривая стандартный ряд мощностей электродвигателей, находим, что к УПП допустимо подключать двигатель мощностью 7,5 кВт с номинальным током фазы Iн= 15 А. В случае, если пусковой ток превысит Iдоп (по причине подключения двигателя большей мощности или слишком малого времени пуска), процесс пуска будет остановлен, поскольку сработает автоматический выключатель QF1 со специально подобранной характеристикой.
Les chaînes RC d'amortissement R48, C20, C21, R50, C22, C23, R52, C24, C25 sont connectées en parallèle aux thyristors, empêchant ainsi les fausses activations des thyristors, ainsi que les varistances R49, R51 et R53, absorbant les impulsions de surtension sur 700 V. Les relais de dérivation K1, K2, K3 de type TR91-12VDC-SC-C avec un courant nominal de 40 A shuntent les thyristors de puissance une fois le démarrage terminé.
Le système de contrôle est alimenté par une alimentation de transformateur alimentée par la tension phase-phase du drone. L'alimentation comprend des transformateurs abaisseurs TV1, TV2, un pont de diodes VD1, une résistance de limitation de courant R1, des condensateurs de lissage C1, C3, C5, des condensateurs de suppression de bruit C2, C4, C6 et des stabilisateurs linéaires DA1 et DA2, fournissant des tensions de 12 et 5 V, respectivement.
Le système de contrôle est construit à l'aide d'un microcontrôleur DD1 de type PIC16F873. Le microcontrôleur émet des impulsions de commande pour les thyristors VS1 – VS6 en « allumant » les optosimistors ORT5-ORT10 (MOC3052). Pour limiter le courant dans les circuits de commande des thyristors VS1 - VS6, des résistances R36 - R47 sont utilisées. Des impulsions de commande sont appliquées simultanément à deux thyristors avec un retard par rapport au début de l'alternance de tension composée. Les circuits de synchronisation avec tension secteur sont constitués de trois unités identiques, constituées de résistances de charge R13, R14, R18, R19, R23, R24, de diodes VD3 - VD8, de transistors VT1 - VT3, de condensateurs de stockage C17 - C19 et d'optocoupleurs OPT2 - OPT4. A partir de la sortie 4 des optocoupleurs OPT2, OPT3, OPT4, des impulsions d'une durée d'environ 100 µs sont reçues aux entrées du microcontrôleur RC2, RC1, RC0, correspondant au début de l'alternance négative des tensions de phase Uab, Ubc, Uca.
Les schémas de fonctionnement de l'unité de synchronisation sont illustrés à la figure 5. Si nous prenons le graphique du haut comme tension secteur Uav, alors le graphique du milieu correspondra à la tension sur le condensateur C17 et le graphique du bas correspondra au courant traversant la photodiode. de l'optocoupleur ORT2. Le microcontrôleur enregistre les impulsions d'horloge arrivant à ses entrées, détermine la présence, l'ordre d'alternance, l'absence de « collage » des phases, et calcule également le temps de retard des impulsions de commande des thyristors. Les entrées des circuits de synchronisation sont protégées des surtensions par des varistances R17, R22 et R27.
À l'aide des potentiomètres R2, R3, R4, les paramètres correspondant au schéma de fonctionnement du démarreur progressif illustré à la figure 2 sont définis ; respectivement, R2 – Tstart, R3 – Tbrake, R4 – Unstart Uots. Les tensions de consigne des moteurs R2, R3, R4 sont fournies aux entrées RA2, RA1, RA0 du microcircuit DD1 et converties à l'aide d'un CAN. Les temps de démarrage et de freinage sont réglables de 3 à 15 s, et la tension initiale est réglable de zéro à une tension correspondant à l'angle de conduction du thyristor de 60 degrés électriques. Les condensateurs C8 à C10 suppriment le bruit.
La commande « START » est émise par la fermeture des contacts 1 et 2 du connecteur XS2, et un journal apparaît à la sortie 4 de l'optocoupleur OPT1. 1; les condensateurs C14 et C15 suppriment les oscillations dues au «rebond» des contacts. La position ouverte des contacts 1 et 2 du connecteur XS2 correspond à la commande « STOP ». La commutation du circuit de commande de lancement peut être réalisée avec un bouton de verrouillage, un interrupteur à bascule ou des contacts de relais.
Les thyristors de puissance sont protégés de la surchauffe par un thermostat B1009N à contacts normalement fermés situé sur le dissipateur thermique. Lorsque la température atteint 80°C, les contacts du thermostat s'ouvrent et un niveau de journalisation est envoyé à l'entrée RC3 du microcontrôleur. 1, indiquant une surchauffe.
Les LED HL1, HL2, HL3 servent d'indicateurs des états suivants :
- HL1 (vert) « Prêt » – aucune condition d'urgence, prêt à lancer ;
- HL2 (vert) « Fonctionnement » – une LED clignotante signifie que le démarreur progressif démarre ou freine le moteur, une lumière constante signifie qu'il fonctionne en bypass ;
- HL3 (rouge) « Alarme » – indique une surchauffe du dissipateur thermique, l'absence ou le « collage » des tensions de phase.
Les relais de contournement K1, K2, K3 sont activés en fournissant un journal au microcontrôleur. 1 à la base du transistor VT4.
La programmation du microcontrôleur s'effectue en circuit, pour lequel le connecteur XS3, la diode VD2 et le microswitch J1 sont utilisés. Les éléments ZQ1, C11, C12 forment le circuit de démarrage du générateur d'horloge, R5 et C7 sont le circuit de réinitialisation de l'alimentation, C13 filtre le bruit le long des bus d'alimentation du microcontrôleur.
La figure 6 montre un algorithme simplifié pour le fonctionnement du démarreur progressif. Après avoir initialisé le microcontrôleur, le sous-programme Error_Test est appelé, qui détermine la présence de situations d'urgence : surchauffe du dissipateur thermique, impossibilité de se synchroniser avec la tension secteur en raison d'une perte de phase, d'une connexion incorrecte au réseau ou de fortes interférences. Si la situation d'urgence n'est pas enregistrée, alors la variable Erreur reçoit la valeur « 0 », après le retour du sous-programme, la LED « Prêt » s'allume et le circuit passe en mode veille pour la commande « START ». Après avoir enregistré la commande « START », le microcontrôleur effectue une conversion analogique-numérique des tensions de consigne sur les potentiomètres et calcule les paramètres Tstart et Ustart, après quoi il émet des impulsions de commande pour les thyristors de puissance. A la fin du démarrage, le bypass est activé. Lorsque le moteur freine, les processus de contrôle sont effectués dans l'ordre inverse.
www.zvezda-el.ru
Démarrage en douceur d'un moteur électrique - ElectrikTop.ru

Les moteurs électriques sont les machines électriques les plus répandues au monde. Aucune entreprise industrielle, aucun processus technologique ne peut s'en passer. Rotation des ventilateurs, des pompes, mouvement des bandes transporteuses, mouvement des grues - il s'agit d'une liste incomplète, mais déjà importante, de tâches résolues à l'aide de moteurs.
Il existe cependant une nuance dans le fonctionnement de tous les moteurs électriques sans exception : au moment du démarrage, ils consomment brièvement un courant important, appelé courant de démarrage.
Pourquoi le courant de démarrage d'un moteur électrique est-il dangereux ?
Lorsqu'une tension est appliquée à l'enroulement du stator, la vitesse de rotation du rotor est nulle. Le rotor doit être déplacé et tourné à la vitesse nominale. Cela nécessite beaucoup plus d’énergie que ce qui est nécessaire pour le mode de fonctionnement nominal.
 En charge, les courants d’appel sont plus élevés qu’au ralenti. La résistance mécanique à la rotation du mécanisme entraîné par le moteur s'ajoute au poids du rotor. En pratique, ils tentent de minimiser l’influence de ce facteur. Par exemple, pour les ventilateurs puissants, les registres des conduits d'air se ferment automatiquement au moment du démarrage.
En charge, les courants d’appel sont plus élevés qu’au ralenti. La résistance mécanique à la rotation du mécanisme entraîné par le moteur s'ajoute au poids du rotor. En pratique, ils tentent de minimiser l’influence de ce facteur. Par exemple, pour les ventilateurs puissants, les registres des conduits d'air se ferment automatiquement au moment du démarrage.
Au moment où le courant de démarrage provient du réseau, une puissance importante est consommée pour amener le moteur électrique à son mode de fonctionnement nominal. Plus le moteur électrique est puissant, plus il a besoin de puissance pour accélérer. Tous les réseaux électriques ne tolèrent pas ce régime sans conséquences.
La surcharge des lignes d'alimentation entraîne inévitablement une diminution de la tension du réseau. Cela rend non seulement le démarrage des moteurs électriques encore plus difficile, mais affecte également les autres consommateurs.
Et les moteurs électriques eux-mêmes subissent des charges mécaniques et électriques accrues lors des processus de démarrage. Les mécaniques sont associées à une augmentation du couple sur l'arbre. Les électriques, associés à une augmentation à court terme du courant, affectent l'isolation des enroulements du stator et du rotor, des connexions de contact et de l'équipement de démarrage.
Méthodes pour réduire les courants d'appel
Les moteurs électriques de faible puissance dotés de ballasts bon marché démarrent assez bien sans aucun moyen. Réduire leurs courants de démarrage ou modifier la vitesse de rotation n’est pas économiquement réalisable.
Mais, lorsque l'influence sur le mode de fonctionnement du réseau lors du processus de démarrage est importante, les courants d'appel doivent être réduits. Ceci est réalisé grâce à :
- application de moteurs électriques à rotor bobiné ;
- utiliser un circuit pour commuter les enroulements de l'étoile au triangle ;
- utilisation de démarreurs progressifs ;
- utilisation de convertisseurs de fréquence.
Une ou plusieurs de ces méthodes conviennent à chaque mécanisme.
Moteurs électriques à rotor bobiné
 L'utilisation de moteurs électriques asynchrones à rotor bobiné dans des zones de travail aux conditions de travail difficiles est la forme la plus ancienne de réduction des courants de démarrage. Sans eux, le fonctionnement des grues électrifiées, des excavatrices, ainsi que des concasseurs, cribles et broyeurs, qui démarrent rarement lorsqu'il n'y a pas de produit dans le mécanisme entraîné, est impossible.
L'utilisation de moteurs électriques asynchrones à rotor bobiné dans des zones de travail aux conditions de travail difficiles est la forme la plus ancienne de réduction des courants de démarrage. Sans eux, le fonctionnement des grues électrifiées, des excavatrices, ainsi que des concasseurs, cribles et broyeurs, qui démarrent rarement lorsqu'il n'y a pas de produit dans le mécanisme entraîné, est impossible.
La réduction du courant de démarrage est obtenue en supprimant progressivement les résistances du circuit du rotor. Initialement, au moment où la tension est appliquée, la résistance maximale possible est connectée au rotor. Au fur et à mesure que le relais temporisé accélère, ils activent l'un après l'autre des contacteurs qui contournent les sections résistives individuelles. En fin d'accélération, la résistance supplémentaire reliée au circuit rotorique est nulle.
Les moteurs de grue ne disposent pas de commutation automatique d'étage avec résistances. Cela se produit à la volonté du grutier qui déplace les leviers de commande.
Commutation du schéma de connexion de l'enroulement du stator
 Dans le brno (bloc de distribution de démarrage des enroulements) de tout moteur électrique triphasé, il y a 6 bornes des enroulements de toutes les phases. Ainsi, ils peuvent être connectés soit en étoile, soit en triangle.
Dans le brno (bloc de distribution de démarrage des enroulements) de tout moteur électrique triphasé, il y a 6 bornes des enroulements de toutes les phases. Ainsi, ils peuvent être connectés soit en étoile, soit en triangle.
De ce fait, une certaine polyvalence dans l'utilisation de moteurs électriques asynchrones est obtenue. Le circuit de connexion en étoile est conçu pour un niveau de tension plus élevé (par exemple, 660 V) et le circuit de connexion en triangle pour un niveau de tension inférieur (dans cet exemple, 380 V).
Mais à une tension d'alimentation nominale correspondant à un circuit triangle, vous pouvez utiliser un circuit en étoile pour pré-accélérer le moteur électrique. Dans ce cas, le bobinage fonctionne à une tension d'alimentation réduite (380 V au lieu de 660) et le courant d'appel est réduit.
Pour contrôler le processus de commutation, vous aurez besoin d'un câble supplémentaire dans le moteur électrique, car les 6 bornes d'enroulement sont utilisées. Des démarreurs et relais temporisés supplémentaires sont installés pour contrôler leur fonctionnement.
Convertisseurs de fréquence
Les deux premières méthodes ne peuvent pas être appliquées partout. Mais les suivants, devenus disponibles relativement récemment, permettent de démarrer en douceur n'importe quel moteur électrique asynchrone.
Un convertisseur de fréquence est un dispositif semi-conducteur complexe qui combine l'électronique de puissance et des éléments de la technologie des microprocesseurs. La partie puissance redresse et lisse la tension du secteur, la transformant en tension constante. La partie sortie de cette tension forme une tension sinusoïdale avec une fréquence variable de zéro à la valeur nominale - 50 Hz.
De ce fait, des économies d'énergie sont réalisées : les unités entraînées en rotation ne fonctionnent pas avec une productivité excessive, étant dans un mode strictement requis. De plus, le processus technologique a la possibilité d’être affiné.

Mais c'est important dans le spectre du problème considéré : les convertisseurs de fréquence permettent un démarrage en douceur du moteur électrique, sans à-coups ni à-coups. Il n'y a aucun courant de démarrage.
Démarreurs progressifs
Un démarreur progressif pour moteur électrique est le même convertisseur de fréquence, mais avec des fonctionnalités limitées. Il ne fonctionne que lorsque le moteur électrique accélère, modifiant progressivement sa vitesse de rotation de la valeur minimale spécifiée à la valeur nominale.
Pour éviter un fonctionnement inutile de l'appareil une fois l'accélération du moteur électrique terminée, un contacteur de dérivation est installé à proximité. Il connecte le moteur électrique directement au réseau une fois le démarrage terminé.
Lors de la mise à niveau d’équipement, il s’agit de la méthode la plus simple. Il est souvent possible de le mettre en œuvre de vos propres mains, sans l'intervention de spécialistes hautement spécialisés. L'appareil est installé à la place du démarreur magnétique qui contrôle le démarrage du moteur électrique. Il peut être nécessaire de remplacer le câble par un câble blindé. Ensuite, les paramètres du moteur électrique sont entrés dans la mémoire de l'appareil et celui-ci est prêt à fonctionner.
Mais tout le monde ne peut pas gérer seul des convertisseurs de fréquence à part entière. Par conséquent, leur utilisation en exemplaires uniques n’a généralement aucun sens. L'installation de convertisseurs de fréquence n'est justifiée que lors d'une modernisation générale de l'équipement électrique de l'entreprise.
electrictop.ru
Démarrage progressif à faire soi-même d'un moteur électrique
Dispositif de démarrage progressif du moteur électrique
 L'un des principaux inconvénients des moteurs électriques asynchrones à rotor à cage d'écureuil est la présence de courants de démarrage élevés. Et si théoriquement les méthodes pour les réduire sont bien développées depuis assez longtemps, alors presque tous ces développements (utilisation de résistances et de réacteurs de démarrage, commutation étoile-triangle, utilisation de régulateurs de tension à thyristors, etc.) ont été utilisé dans des cas très rares.
L'un des principaux inconvénients des moteurs électriques asynchrones à rotor à cage d'écureuil est la présence de courants de démarrage élevés. Et si théoriquement les méthodes pour les réduire sont bien développées depuis assez longtemps, alors presque tous ces développements (utilisation de résistances et de réacteurs de démarrage, commutation étoile-triangle, utilisation de régulateurs de tension à thyristors, etc.) ont été utilisé dans des cas très rares.
Tout a radicalement changé à notre époque, parce que... Grâce aux progrès de l'électronique de puissance et de la technologie des microprocesseurs, des démarreurs progressifs compacts, pratiques et efficaces pour moteurs électriques (démarreurs progressifs) sont apparus sur le marché.
Les dispositifs de démarrage progressif pour moteurs asynchrones sont des dispositifs qui augmentent considérablement la durée de vie des moteurs électriques et des actionneurs fonctionnant à partir de l'arbre de ce moteur. Lorsque la tension d'alimentation est appliquée de la manière habituelle, des processus se produisent qui détruisent le moteur électrique.
Le courant et la tension de démarrage sur les enroulements du moteur, pendant les processus transitoires, dépassent considérablement les valeurs admissibles. Cela entraîne l'usure et la rupture de l'isolation des enroulements, la brûlure des contacts et réduit considérablement la durée de vie des roulements, à la fois du moteur lui-même et des dispositifs posés sur l'arbre du moteur électrique.
 Pour fournir la puissance de démarrage nécessaire, il est nécessaire d'augmenter la puissance nominale des réseaux électriques d'alimentation, ce qui entraîne une augmentation significative du coût des équipements et une consommation excessive d'électricité.
Pour fournir la puissance de démarrage nécessaire, il est nécessaire d'augmenter la puissance nominale des réseaux électriques d'alimentation, ce qui entraîne une augmentation significative du coût des équipements et une consommation excessive d'électricité.
De plus, une chute de la tension d'alimentation au moment du démarrage du moteur électrique peut entraîner des dommages aux équipements fonctionnant à partir des mêmes sources d'alimentation ; la même chute provoque de graves dommages à l'équipement d'alimentation électrique et réduit sa durée de vie.
Au moment du démarrage, le moteur électrique constitue une source importante d'interférences électromagnétiques qui perturbent le fonctionnement des équipements électroniques alimentés par les mêmes réseaux électriques ou situés à proximité immédiate du moteur.
Si une urgence survient et que le moteur surchauffe ou grille, alors, en raison du chauffage, les paramètres de l'acier du transformateur changeront tellement que la puissance nominale du moteur réparé peut être réduite jusqu'à 30 %, en conséquence , ce moteur électrique ne sera pas adapté à une utilisation à sa place d'origine.
Le dispositif de démarrage progressif pour moteurs électriques combine les fonctions de démarrage et de freinage progressifs, de protection des mécanismes et des moteurs électriques, ainsi que de communication avec les systèmes d'automatisation.
Un démarrage progressif à l'aide d'un démarreur progressif est réalisé en augmentant lentement la tension pour accélérer en douceur le moteur et réduire les courants de démarrage. Les paramètres réglables sont généralement la tension initiale, le temps d'accélération et le temps de décélération du moteur électrique. Une très faible tension de démarrage peut réduire considérablement le couple de démarrage du moteur, elle est donc généralement réglée entre 30 et 60 % de la tension nominale.
Au démarrage, la tension augmente brusquement jusqu'à la valeur réglée de la tension initiale, puis monte progressivement jusqu'à la valeur nominale pendant le temps d'accélération spécifié. Le moteur électrique accélère alors doucement et rapidement jusqu’à sa vitesse nominale.
L'utilisation de démarreurs progressifs permet de réduire le courant d'appel à des valeurs minimales et de réduire le nombre de relais et contacteurs utilisés. interrupteurs. Fournit une protection fiable des moteurs électriques contre les surcharges d'urgence, la surchauffe, le brouillage, la perte de phase et réduit le niveau d'interférence électromagnétique.
Les démarreurs progressifs pour moteurs électriques sont simples à concevoir, à installer et à utiliser.
Un exemple de schéma de connexion pour un démarreur progressif de moteur électrique
Lors du choix d'un démarreur progressif, tenez compte des éléments suivants :
1. Courant du moteur. Il est nécessaire de sélectionner un démarreur progressif en fonction du courant à pleine charge du moteur, qui ne doit pas dépasser le courant de charge maximum du démarreur progressif.
3. Tension secteur. Chaque démarreur progressif est conçu pour fonctionner à une tension spécifique. La tension d'alimentation doit correspondre à la valeur nominale du démarreur progressif.
Démarreurs progressifs
télécharger la liste de prix télécharger le manuel
Le démarrage progressif est l'une des conditions essentielles pour un fonctionnement sûr et à long terme des moteurs électriques asynchrones triphasés.
Série LD1000
Le démarreur progressif de la série LD1000 permet une accélération et une décélération en douceur du moteur électrique, réduisant ainsi la charge sur le réseau électrique et les mécanismes de démarrage. Le LD1000 met en œuvre cette tâche en limitant le courant de démarrage et le couple en augmentant progressivement la tension fournie au moteur électrique.
Si vous ne savez pas quel démarreur progressif choisir, nos responsables vous aideront toujours en appelant le +7 495 981-54-56.
Seulement ici, vous pouvez acheter des démarreurs progressifs à un rapport qualité-prix optimal !
Principales caractéristiques techniques :
- Tension d'alimentation 380 V, 50 Hz
- Limite le courant de démarrage à 450 % du courant nominal du moteur
- Commande de contacteur de bypass (système de bypass)
- Protection du moteur (court-circuit, surtension, sous-tension, surcharge, perte de phase, surintensité, etc.)
- Température de fonctionnement de 0 à +50˚С, humidité relative de l'air pas plus de 95 % sans condensation
- Temps d'accélération maximum 60 s.
Démarrage progressif du ventilateur de refroidissement

Finalement, j'ai eu une minute de libre et j'ai décidé de fabriquer un autre appareil pour ma voiture) Cette fois, je suis arrivé au ventilateur du système de refroidissement du moteur. Dans la version standard, lorsque le VSOD est allumé, la tension du réseau de bord chute. Lorsque j'ai installé l'appareil que j'avais fabriqué, j'ai obtenu une augmentation douce du courant dans l'enroulement du moteur lorsqu'il était allumé, éliminant ainsi les brusques sauts de courant, ainsi que les creux et les chutes soudaines de la tension du réseau de bord.
P.S. Cet appareil est placé le plus près possible du ventilateur, sinon des interférences pourraient survenir et gêner le fonctionnement normal du véhicule.
Application du microcircuit KR1182PM1. Démarrage en douceur du moteur électrique
Démarreurs progressifs pour moteurs électriques
Le démarrage progressif d'un moteur électrique est récemment de plus en plus utilisé. Ses domaines d'application sont variés et nombreux. Il s’agit de l’industrie, du transport électrique, des services publics et de l’agriculture. L'utilisation de tels dispositifs peut réduire considérablement les charges de démarrage sur le moteur électrique et les actionneurs, prolongeant ainsi leur durée de vie.
Courants de démarrage
Les courants de démarrage atteignent des valeurs 7 à 10 fois supérieures à celles du mode de fonctionnement. Cela entraîne une chute de tension dans le réseau d'alimentation, ce qui affecte négativement non seulement le fonctionnement des autres consommateurs, mais également le moteur lui-même. Le temps de démarrage est retardé, ce qui peut entraîner une surchauffe des bobinages et une destruction progressive de leur isolation. Cela contribue à une panne prématurée du moteur électrique.
Les dispositifs de démarrage progressif peuvent réduire considérablement la charge de démarrage sur le moteur électrique et le réseau électrique, ce qui est particulièrement important dans les zones rurales ou lorsque le moteur est alimenté par une centrale électrique autonome.
Surcharge des actionneurs
Lorsque le moteur démarre, le couple sur son arbre est très instable et dépasse la valeur nominale de plus de cinq fois. Par conséquent, les charges de démarrage des actionneurs sont également augmentées par rapport au fonctionnement en régime permanent et peuvent atteindre jusqu'à 500 pour cent. L'instabilité du couple de démarrage entraîne des chocs sur les dents des engrenages, le cisaillement des clavettes et parfois même la torsion des arbres.
Les dispositifs de démarrage progressif des moteurs électriques réduisent considérablement les charges de démarrage sur le mécanisme : les espaces entre les dents des engrenages sont sélectionnés en douceur, ce qui évite leur rupture. Les entraînements par courroie tendent également en douceur les courroies d'entraînement, ce qui réduit l'usure des mécanismes.
En plus d'un démarrage en douceur, le mode de freinage en douceur a un effet bénéfique sur le fonctionnement des mécanismes. Si le moteur entraîne la pompe, un freinage en douceur évite les coups de bélier lorsque l'unité est éteinte.
Démarreurs progressifs industriels
Les démarreurs progressifs sont actuellement produits par de nombreuses entreprises, par exemple Siemens, Danfoss, Schneider Electric. De tels appareils ont de nombreuses fonctions programmables par l'utilisateur. Il s'agit du temps d'accélération, du temps de décélération, de la protection contre les surcharges et de nombreuses autres fonctions supplémentaires.
Malgré tous leurs avantages, les appareils de marque présentent un inconvénient : un prix assez élevé. Cependant, vous pouvez créer vous-même un tel appareil. Dans le même temps, son coût sera faible.
Dispositif de démarrage progressif basé sur le microcircuit KR1182PM1
La première partie de l'article parlait du microcircuit spécialisé KR1182PM1. représentant un régulateur de puissance de phase. Des circuits typiques pour l'allumer, des dispositifs de démarrage progressif pour lampes à incandescence et simplement des régulateurs de puissance de charge ont été pris en compte. Sur la base de ce microcircuit, il est possible de créer un dispositif de démarrage progressif assez simple pour un moteur électrique triphasé. Le schéma de l'appareil est illustré à la figure 1.
Figure 1. Schéma du dispositif de démarrage progressif du moteur.
Un démarrage progressif est effectué en augmentant progressivement la tension sur les enroulements du moteur de zéro à la valeur nominale. Ceci est réalisé en augmentant l'angle d'ouverture des commutateurs à thyristors pendant un temps appelé temps de démarrage.
Description du circuit
La conception utilise un moteur électrique triphasé 50 Hz, 380 V. Les enroulements du moteur connectés en étoile sont connectés aux circuits de sortie indiqués dans le schéma par L1, L2, L3. Le point central de l'étoile est relié au neutre du réseau (N).
Les commutateurs de sortie sont réalisés sur des thyristors connectés dos à dos - en parallèle. La conception utilise des thyristors importés de type 40TPS12. À faible coût, elles ont un courant assez élevé - jusqu'à 35 A, et leur tension inverse est de 1 200 V. En plus d'elles, les clés contiennent plusieurs autres éléments. Leur fonction est la suivante : des circuits RC d'amortissement connectés en parallèle avec les thyristors évitent les faux enclenchements de ces derniers (dans le schéma il s'agit de R8C11, R9C12, R10C13), et à l'aide des varistances RU1 RU3 le bruit de commutation est absorbé, l'amplitude dont dépasse 500 V.
Les microcircuits DA1 DA3 de type KR1182PM1 sont utilisés comme nœuds de contrôle pour les commutateurs de sortie. Ces microcircuits ont été discutés en détail dans la première partie de l'article. Les condensateurs C5 C10 à l'intérieur du microcircuit forment une tension en dents de scie synchronisée avec le réseau. Les signaux de commande des thyristors dans le microcircuit sont générés en comparant la tension en dents de scie avec la tension entre les broches 3 et 6 du microcircuit.
Pour alimenter le relais K1 K3, l'appareil dispose d'une alimentation composée de seulement quelques éléments. Il s'agit du transformateur T1, du pont redresseur VD1, du condensateur de lissage C4. A la sortie du redresseur, un stabilisateur intégré DA4 type 7812 est installé, fournissant une tension de sortie de 12 V, et une protection contre les courts-circuits et les surcharges en sortie.
Description du fonctionnement du démarreur progressif pour moteurs électriques
La tension secteur est fournie au circuit lorsque l'interrupteur d'alimentation Q1 est fermé. Cependant, le moteur ne démarre pas encore. Cela se produit parce que les enroulements du relais K1 K3 sont toujours hors tension et que leurs contacts normalement fermés contournent les broches 3 et 6 des microcircuits DA1 DA3 à travers les résistances R1 R3. Cette circonstance empêche la charge des condensateurs C1 C3, de sorte que le microcircuit ne génère pas d'impulsions de commande.
Mise en service de l'appareil
Lorsque l'interrupteur à bascule SA1 est fermé, la tension 12 V active le relais K1 K3. Leurs contacts normalement fermés s'ouvrent, ce qui permet de charger les condensateurs C1 C3 à partir de générateurs de courant internes. Parallèlement à l'augmentation de la tension sur ces condensateurs, l'angle d'ouverture des thyristors augmente également. Cela permet d'obtenir une augmentation douce de la tension sur les enroulements du moteur. Lorsque les condensateurs sont complètement chargés, l'angle de commutation des thyristors atteindra sa valeur maximale et la vitesse de rotation du moteur électrique atteindra la vitesse nominale.
Arrêt du moteur, freinage en douceur
Pour arrêter le moteur, ouvrez l'interrupteur SA1, ce qui éteindra le relais K1 K3. Ils sont normaux - les contacts fermés se fermeront, ce qui entraînera la décharge des condensateurs C1 C3 à travers les résistances R1 R3. La décharge des condensateurs durera plusieurs secondes, pendant lesquelles le moteur s'arrêtera.
Lors du démarrage du moteur, des courants importants peuvent circuler dans le fil neutre. Cela se produit parce que lors d'une accélération douce, les courants dans les enroulements du moteur ne sont pas sinusoïdaux, mais il n'y a pas lieu d'en avoir particulièrement peur : le processus de démarrage est assez de courte durée. En régime permanent, ce courant sera bien inférieur (pas plus de dix pour cent du courant de phase en mode nominal), ce qui est dû uniquement à la dispersion technologique des paramètres d'enroulement et au déséquilibre de phase. Il n’est plus possible de s’affranchir de ces phénomènes.
Détails et conception
Pour assembler l'appareil, les pièces suivantes sont nécessaires :
Transformateur d'une puissance maximale de 15 W, avec une tension d'enroulement de sortie de 15-17 V.
Les relais K1 K3 conviennent à toute bobine 12 V avec un contact normalement fermé ou de commutation, par exemple TRU-12VDC-SB-SL.
Condensateurs C11 C13 type K73-17 pour une tension de fonctionnement d'au moins 600 V.
L'appareil est réalisé sur un circuit imprimé. L'appareil assemblé doit être placé dans un boîtier en plastique de dimensions appropriées, sur le panneau avant duquel doivent être placés l'interrupteur SA1 et les LED HL1 et HL2.
Connexion moteur
La liaison entre l'interrupteur Q1 et le moteur se fait avec des fils dont la section correspond à la puissance de ce dernier. Le fil neutre est constitué du même fil que les fils de phase. Avec les valeurs nominales des composants indiquées dans le schéma, il est possible de connecter des moteurs d'une puissance allant jusqu'à quatre kilowatts.
Si vous envisagez d'utiliser un moteur d'une puissance ne dépassant pas un kilowatt et demi et que la fréquence de démarrage ne dépassera pas 10 15 par heure, la puissance dissipée par les interrupteurs à thyristors est insignifiante, les radiateurs ne peuvent donc pas être installée.
Si vous envisagez d'utiliser un moteur plus puissant ou si les démarrages seront plus fréquents, vous devrez installer des thyristors sur des radiateurs en bande d'aluminium. Si le radiateur est censé être utilisé comme un radiateur commun, les thyristors doivent en être isolés à l'aide d'entretoises en mica. Pour améliorer les conditions de refroidissement, vous pouvez utiliser la pâte thermoconductrice KPT-8.
Vérification et configuration de l'appareil
Avant la mise sous tension, vous devez tout d'abord vérifier la conformité de l'installation avec le schéma électrique. C’est la règle de base et vous ne pouvez pas y déroger. Après tout, négliger ce contrôle peut conduire à un tas de pièces carbonisées et vous décourager pendant longtemps de faire des expériences avec l'électricité. Les erreurs trouvées doivent être éliminées, car après tout, ce circuit est alimenté par le réseau et il ne faut pas le prendre à la légère. Et même après ce contrôle, il est encore trop tôt pour brancher le moteur.
Tout d'abord, au lieu du moteur, vous devez connecter trois lampes à incandescence identiques d'une puissance de 60 à 100 W. Lors des tests, il est nécessaire de s'assurer que les lampes s'allument uniformément.
L'irrégularité du temps de commutation est due à la dispersion des capacités des condensateurs C1 C3, qui ont une tolérance de capacité importante. Par conséquent, il est préférable de les sélectionner immédiatement à l'aide de l'appareil avant l'installation, au moins avec une précision allant jusqu'à dix pour cent.
Le temps d'arrêt est également déterminé par la résistance des résistances R1 R3. Avec leur aide, vous pouvez ajuster l'heure d'arrêt. Ces réglages doivent être effectués si la répartition du temps de marche/arrêt dans différentes phases dépasse 30 pour cent.
Le moteur ne peut être connecté qu'après que les contrôles ci-dessus se soient déroulés normalement, pour ne pas dire même parfaitement.
Que peut-on ajouter d'autre au design ?
Il a déjà été dit plus haut que de tels appareils sont actuellement produits par différentes sociétés. Bien sûr, il est impossible de reproduire toutes les fonctions des appareils de marque dans un tel appareil fait maison, mais vous pouvez probablement en copier un.
Nous parlons d'un contacteur dit de contournement. Son objectif est le suivant : une fois que le moteur a atteint son régime nominal, le contacteur ponte simplement les interrupteurs à thyristors avec ses contacts. Le courant les traverse en contournant les thyristors. Cette conception est souvent appelée bypass (de l'anglais bypass - bypass). Pour une telle amélioration, des éléments supplémentaires devront être introduits dans l'unité de contrôle.
Sources.
- asynchrone,
- collectionneur;
- synchrone.
Tous les moteurs répertoriés font partie d’un entraînement électrique conçu pour communiquer avec la charge utile. En fonction de la charge, le moteur est arrêté puis redémarré. Nous parlerons ensuite plus en détail de ce qui se passe lors du démarrage d'un moteur électrique et de la manière d'optimiser ce processus.
Que se passe-t-il lors du démarrage d'un moteur asynchrone
Pour comprendre quel appareil utiliser pour démarrer en douceur un moteur électrique, il faut connaître le principe de son fonctionnement. Les moteurs les plus courants sont les moteurs asynchrones à rotor à cage d'écureuil. Leur conception simple et leur fiabilité correspondante ont déterminé la popularité de ces machines électriques. Bien que le rotor tourne et que sa forme soit optimisée pour ce processus, il n'est rien d'autre que l'enroulement secondaire du transformateur.
Et, comme vous le savez, si un courant circule dans l'enroulement primaire, alors un champ électromagnétique apparaît dans son noyau. Les fonctions répertoriées dans un moteur asynchrone sont assurées par le stator. Son champ magnétique, qui contrairement à un transformateur, tourne autour du rotor, y induit des courants associés à cette rotation. Et plus la différence entre les vitesses du champ et du rotor est grande, plus le courant dans ce dernier est important. Après tout, le rotor est un enroulement en court-circuit. Et comme il y a une connexion par transformateur, cela signifie que les courants dans les enroulements sont directement proportionnels.
Nous listons maintenant les conditions qui existent lors du démarrage d'un moteur asynchrone alimenté par un réseau industriel. Tout d'abord, regardons l'option triphasée :
- tension constante;
- fréquence constante;
- le rotor est au repos.
La connexion d'un moteur asynchrone à un réseau électrique crée instantanément un champ magnétique tournant. Dans ce cas, la différence de vitesse entre celui-ci et le rotor (le soi-disant glissement, exprimé en pourcentage de la vitesse de rotation du champ électromagnétique du stator) est maximale. Et, par conséquent, c’est comme un mode court-circuit du transformateur. Si la puissance du moteur est élevée, les courants de démarrage sont au niveau de ceux considérés comme d'urgence pour des transformateurs de puissance électrique similaire.
Le dispositif à utiliser pour les limiter est assez clair. Cela devrait:
- ou réduire la tension sur les enroulements du stator pendant que le rotor accélère ;
- ou faites tourner le rotor jusqu'à ce que le stator soit connecté au réseau électrique.
- Il est également possible d'apporter des modifications à la conception d'un moteur asynchrone.
Commutation du circuit d'enroulement
Le rotor ne peut être entraîné que dans certains entraînements électriques. Pour cette raison, cette méthode n’est pas typique. Il en reste deux, dont le premier est le plus utilisé. Mais obtenir une chute de tension sans pertes n’est pas si simple. Dans un circuit triphasé, cela peut être effectué en passant du triangle à l'étoile et inversement. La tension linéaire appliquée aux enroulements du stator du moteur assure son efficacité supérieure en mode de fonctionnement. Mais le courant de démarrage dans le circuit triangulaire est plus important.
Par conséquent, le passage à un circuit en étoile permet de réduire considérablement le courant de démarrage d'un moteur asynchrone. C’est la méthode la plus simple pour un démarrage relativement fluide. Il utilise un nombre minimum d'éléments supplémentaires, puisque la chute de tension est créée par les capacités du réseau électrique triphasé lui-même. Ces éléments sont des commutateurs et le schéma lui-même est présenté ci-dessous. Mais un schéma aussi simple n'est applicable que dans un réseau triphasé. Dans la version monophasée, il n'y a pas de tension effective inférieure à la tension de phase.

Utiliser des résistances
Pour obtenir l'accélération la plus douce possible du moteur, il est nécessaire d'utiliser des éléments assurant une chute de tension appropriée. À cette fin, les éléments suivants sont utilisés :
- résistances;
- selfs (réacteurs);
- autotransformateurs;
- amplificateurs magnétiques.
Ces méthodes conviennent aussi bien aux réseaux triphasés qu'aux réseaux monophasés. Dans tous les cas, vous devrez utiliser des commutateurs, car à un moment donné, vous devrez connecter le moteur directement au réseau. Le circuit avec résistances est le plus compact. Cependant, à mesure que la puissance du moteur augmente, la puissance des résistances de démarrage augmente également en conséquence. Étant donné qu'ils sont chauffés, le temps de démarrage doit se situer dans la plage de température autorisée. Sinon, les résistances deviendront inutilisables en raison d'une surchauffe. Le circuit de démarrage progressif utilisant des résistances est illustré ci-dessous.

Utilisation d'inducteurs
Si vous clonez le circuit, vous pouvez obtenir un démarrage progressif en utilisant plusieurs groupes de résistances connectées en parallèle, ce qui allégera leur charge thermique. Mais une augmentation du temps de démarrage progressif s'accompagnera d'une augmentation des pertes d'énergie dans ces résistances. Pour cette raison, des éléments inductifs sont utilisés à la place des résistances. Dans le cas le plus simple, ce sont des starters. Il s'agit d'une solution plus lourde et plus coûteuse, mais afin de réduire les pertes d'énergie dues aux redémarrages fréquents des moteurs, il est nécessaire de l'utiliser. L'apparence du réacteur pour un puissant moteur asynchrone est présentée ci-dessous.

Si l'inductance utilisée lors du démarrage se présente sous la forme d'un autotransformateur avec un contact mobile se déplaçant le long des spires de l'enroulement, vous pouvez soit déboguer de manière optimale le processus de démarrage, soit le contrôler en déplaçant le contact mobile. L'inconvénient de cette option est la formation d'étincelles inévitables lors du contact mécanique. Pour cette raison, elle n’est applicable que pour des puissances moteur relativement faibles. Les schémas de démarreurs progressifs avec réacteurs et autotransformateurs sont présentés ci-dessous.

Circuits de démarrage progressif :
a) avec des réacteurs ;
b) avec autotransformateurs.
1, 2 et 3 – commutateurs qui contrôlent la commutation
Pour un démarrage en douceur sans les inconvénients inhérents aux autotransformateurs à contact mobile, des amplificateurs magnétiques sont utilisés. Ils utilisent la magnétisation, ce qui permet de modifier la valeur de la réactance inductive. La conception des amplificateurs magnétiques est très diversifiée. Mais leur principal avantage réside dans le faible courant et, par conséquent, la puissance utilisée pour le contrôle. Ils n'ont pas de contacts de commande à travers lesquels circulent des courants importants. L'un des diagrammes est présenté ci-dessous.

Moteur à rotor bobiné
Tous les dispositifs de démarrage progressif considérés pour un moteur électrique asynchrone sont utilisés côté stator. Mais lorsque les redémarrages constants constituent un processus de fonctionnement normal du moteur, sa conception est modifiée, créant ainsi la phase rotorique. Cette solution de conception permet de réguler plus efficacement les courants apparaissant lors de l'accélération du moteur. La conception et les recommandations pour le fonctionnement d'un dispositif de démarrage progressif pour un moteur à rotor bobiné sont présentées ci-dessous :

Application des commutateurs à semi-conducteurs
Tous les démarreurs progressifs répertoriés sont utilisés depuis de nombreuses années. Ils possèdent une propriété importante qui les met hors concurrence. Ces appareils n'ont pas de paramètres électriques dont l'excès entraîne la disparition de la résistance (panne). Ce sont donc les plus fiables, même s’ils sont obsolètes. Les démarreurs progressifs modernes utilisent des commutateurs à semi-conducteurs contrôlés (thyristors et transistors). C'est ce qu'on appelle la régulation de la largeur d'impulsion.
L'interrupteur coupe progressivement une partie de la tension sinusoïdale. En conséquence, la valeur de tension moyenne peut être modifiée de zéro à 220 V réels. Par conséquent, un interrupteur à semi-conducteur constitue l'option la plus efficace pour créer un démarreur progressif pour un moteur électrique. Mais en même temps, le commutateur est sujet à la fois à des claquages thermiques et à des effets similaires dus à des amplitudes de tension et de courant excessives. La clé doit donc être efficacement refroidie et sélectionnée en fonction des conditions de fonctionnement du moteur.

Les appareils avec régulation de largeur d'impulsion sont applicables dans n'importe quel réseau, quel que soit le nombre de phases. Un de ces diagrammes est présenté ci-dessous. Une fois le rotor accéléré, les contacts se ferment et protègent les clés des dommages causés par les surtensions et les surtensions.


Démarrage en douceur des moteurs électriques à collecteur
Malgré les différences fondamentales de conception par rapport aux moteurs asynchrones, le démarrage des moteurs à collecteur s'accompagne également d'un courant d'induit important, qui est celui du rotor. Il s'agit essentiellement d'un ensemble de selfs avec commutation séquentielle de chacune d'elles. Plus la tension est exposée longtemps aux lamelles du collecteur, ce qui se produit immédiatement après la mise sous tension et l'application de la tension, plus la magnétisation du noyau est forte et plus la valeur que le courant parvient à atteindre est grande.
Lorsque le stator est conçu comme un aimant permanent, seul l’induit a besoin d’une source d’énergie. Mais dans ce cas, sa tension ne peut être que constante. Le démarreur progressif alimenté par cette source est réalisé uniquement sur des éléments capables de créer une chute de tension continue.
Ces éléments sont :
- des résistances,
- transistors,
- thyristors verrouillables.
Si le stator est conçu comme un électro-aimant, cela signifie que le moteur peut fonctionner sous tension alternative. Avec ce qui précède, les mêmes démarreurs progressifs éprouvés qui sont applicables aux moteurs asynchrones monophasés conviennent aux moteurs à collecteur :
- résistances (rhéostats);
- selfs (réacteurs);
- autotransformateurs;
- amplificateurs magnétiques.
Ainsi que des solutions techniques modernes basées sur des commutateurs à semi-conducteurs. Leurs images sont similaires à celles déjà présentées ci-dessus.
En présence d'excitation électromagnétique, le bobinage peut être connecté à l'induit soit en série, soit en parallèle. Une connexion en série est sûre car un courant électrique total circule dans le circuit électrique. Sa rupture ou sa connexion à la source d'alimentation provoque une modification simultanée du courant dans les enroulements du moteur. Mais avec une connexion parallèle, des scénarios sont possibles.
Si, lorsque la tension est appliquée au moteur, l'enroulement de champ est hors tension et l'induit est sous tension, des conditions se présenteront pour un phénomène appelé emballement du moteur. Dans le même temps, le rotor, essayant d'être attiré par le fer du stator, tourne et accélère de plus en plus vite. Si un moment de charge supérieur à celui créé par le rotor n'est pas appliqué à l'arbre, l'accélération peut continuer jusqu'à la destruction du rotor. Pour se protéger contre la propagation, il faut :
- le moteur est resté au moins partiellement chargé ;
- avait des éléments structurels spéciaux;
- le démarreur progressif était garanti pour empêcher ce processus.
Démarrage progressif du moteur synchrone
Les moteurs synchrones fonctionnant à partir d'un réseau électrique comportant un nombre quelconque de phases sont accélérés comme des moteurs asynchrones, grâce au glissement. Ensuite, en transformant le rotor en un aimant indépendant du stator, les vitesses de rotation des champs du stator et du rotor sont égalisées. Pour cette raison, les démarreurs progressifs utilisés pour les moteurs synchrones sont les mêmes que pour les moteurs asynchrones. Certains détails distinctifs en fonction de l'alimentation du rotor sont visibles plus loin dans l'image :

conclusions
En général, les démarreurs progressifs pour tous les types de moteurs électriques sont similaires et basés sur les mêmes circuits et éléments. Le choix doit être fait en fonction de conditions spécifiques, en fonction principalement de la puissance du moteur. Mais les commutateurs à semi-conducteurs modernes permettent de fournir les meilleurs paramètres de démarrage progressif sur une large plage de puissance. Il est donc logique de les choisir en premier.
De nombreux outils électriques, notamment ceux des années précédentes, ne sont pas équipés d'un dispositif de démarrage progressif. De tels outils sont lancés avec une secousse puissante, ce qui entraîne une usure accrue des roulements, des engrenages et de toutes les autres pièces mobiles. Des fissures apparaissent dans les revêtements isolants du vernis, qui sont directement liées à une défaillance prématurée de l'outil.
Pour éliminer ce phénomène négatif, il existe un circuit pas très compliqué basé sur un régulateur de puissance intégré, développé en Union soviétique, mais il n'est toujours pas difficile de l'acheter sur Internet. Prix à partir de 40 roubles et plus. Il s'appelle KR1182PM1. Fonctionne bien dans une variété de dispositifs de contrôle. Mais nous allons assembler un système de démarrage progressif.

Schéma du circuit du démarreur progressif
Regardons maintenant le diagramme lui-même.
Comme vous pouvez le constater, il n’y a pas beaucoup de composants et ils ne sont pas chers.
Aura besoin
- Microcircuit – KR1182PM1.
- R1 – 470 ohms. R2 – 68 kilo-ohms.
- C1 et C2 – 1 microfarad – 10 volts.
- C3 – 47 microfarads – 10 volts.
La puissance de l'appareil dépend de la marque du triac que vous installez.
Par exemple, la valeur moyenne du courant à l'état ouvert pour différents triacs :
- BT139-600 - 16 ampères,
- BT138-800 - 12 ampères,
- BTA41-600 - 41 ampères.
Assemblage de l'appareil
Vous pouvez en installer d'autres que vous possédez et qui conviennent à votre puissance, mais vous devez tenir compte du fait que plus le triac est puissant, moins il chauffera, ce qui signifie que plus il fonctionnera longtemps. En fonction de la charge, vous devez utiliser un radiateur de refroidissement pour le triac.J'ai installé le BTA41-600, vous n'avez pas du tout besoin d'installer de radiateur, il est assez puissant et ne chauffera pas lors d'un fonctionnement répété à court terme, à une charge allant jusqu'à deux kilowatts. Je n’ai tout simplement pas d’outil plus puissant. Si vous envisagez de connecter une charge plus puissante, pensez au refroidissement.
Assemblons les pièces pour installer l'appareil.

Nous avons également besoin d'une prise « fermée » et d'un câble d'alimentation avec une fiche.

Il est bon d'ajuster la planche à pain à la bonne taille à l'aide de gros ciseaux. Il coupe facilement, simplement et proprement.

Nous plaçons les composants sur la planche à pain. Il est préférable de souder une prise spéciale pour le microcircuit, cela coûte un centime, mais rend le travail beaucoup plus facile. Il n'y a aucun risque de surchauffe des pattes du microcircuit, vous n'avez pas besoin d'avoir peur de l'électricité statique et si le microcircuit grille, il peut être remplacé en quelques secondes. Il suffit de retirer celui brûlé et d'insérer le tout.

Nous soudons les pièces immédiatement.

Nous plaçons de nouvelles pièces sur le tableau en vérifiant le schéma.

Nous le soudons soigneusement.

Pour un triac, les douilles doivent être légèrement percées.

Et ainsi de suite dans l'ordre.

Nous insérons et soudons le cavalier et les autres pièces.

Nous soudons.

Nous vérifions la conformité du circuit et insérons le microcircuit dans la prise, sans oublier la clé.

Nous insérons le circuit fini dans la prise.

Nous connectons l'alimentation à la prise et au circuit.

Veuillez regarder la vidéo testant cet appareil. Le changement de comportement de l'appareil au démarrage est clairement affiché.
Bonne chance à vous dans vos affaires et vos préoccupations.